一种用于高速气流瞬态测温的快速响应热电偶
发布时间:2020-04-09
浏览次数:
摘要:为测量气体高速流动过程中温度的变化情况,人们对
温度传感器的快速响应特性提出了更高的要求.为此,采用直径为30µm的铜丝和康铜丝,利用可控脉冲放电装置焊接制作了T型快速响应
热电偶,并测定了热电偶动态响应特性,得到该热电偶时间常数约为40ms.考虑到热电偶丝对感温结点附近流体状态的影响,以及热电偶的铠装结构对测点附近流场的影响,快速响应热电偶使用新型铠装结构,感温结点裸露,具有更高的可靠性和更好的动态响应特性.
应用快速响应温度传感器测量高速气流的温度变化趋势,在一些研究中显得尤为重要,如乙醇液滴撞击镍的高温热表面后产生瞬间过渡沸腾现象,空调压缩机和再生器的工作过程控制2,内燃机表面的温度测量B4,航天器飞行过程中表面温度的研究凹等对于瞬态测温,普遍应用的方法有薄膜热电偶测温凹和
热电阻测温凹针对轰爆气体和火焰的温度测量,其响应时间为毫秒级,能满足大多数研究的要求但是,这两种热电偶的售价高昂,而且进口手续复杂,供货期长,其铠装结构会对原流场产生影响,导致测量不够准.近年来,国内学者也对瞬态测温热电偶进行了研究中国科学院理化技术研究所的周--欣和刘静图使用电解腐蚀的方法,用100μm普通热电偶丝制作了尖端直径在10~20um的热电偶丝并制成热电偶,但经过腐蚀的铜丝无法保证直径均匀,而且非常脆弱,焊接难度大,焊接成功率较低,以50um热电偶丝焊接制成了时间常数为(118土1.64)ms的快速响应热电偶
目前能够在较为恶劣环境下使用的热电偶,大多.数都使用保护套管铠装,把感温结点与测量环境隔离开来这种方式虽能对热电偶起到很好的保护作用,但是感温结点想要感受到温度变化,热量需要先通过保护套管才能传递到感温结点,导致响应时间变长,无法满足于高速气流瞬态温度测量110
因此,对于高速气流瞬态测温热电偶的研制非常必要本文使用更细的热电偶丝,采用更加合理的结构,制备了一种
微细热电偶,使其能够在流道内对高速气流进行测温,且具有响应迅速、测温正确、制作成本低、实用性强等优点
1快速响应热电偶测量原理
两种不同导体首尾相连组成闭合回路,如果两个连接点的温度不同,则会在回路中产生电动势,这种现象称为塞贝克效应,也叫做第一热电效应利用此效应,使用微细铜丝和康铜丝焊接制成T型快速响应热电偶来测量两结点的温度差
应用于高速气流瞬态测温的快速响应热电偶不同于普通热电偶,在使用中需要满足以下几点要求(1)足够快的响应速度,(2)良好的密封性;(3)足以应对高速气体冲击的物理强度,(4)尽量不对原有的气体流动状态产生影响.
热电偶测温时,感温结点内部的导热热阻明显小于其表面的换热热阻、如尺寸为um级的热电偶,对流速在2~300m/s范围内的低温空气测温时,导热热阻比对流热阻小3个数量级,Bi≤01,满足集中参数法的适用条件因此,对此问题做分析时,采用集中参数法来解决其数学描述为

式中p,c,V,t分别为感温结点的密度、比热容、体积和温度,tg为被测物体摄氏温度,A为感温结点参与换热的表面积,h为复合传热系数.在测温过程中,感温结点受到两种热量传递方式的同时作用:流体与感温结点表面的对流传热,被测介质及感温结点周边固体壁面与感温结点的辐射传热因此,复合传热系数h可写作

式中,h。为对流传热系数,h为等效辐射传热系数
时间常数t。作为热电偶动态响应特性的指标,其定义式为
τc越小,则响应速度越快,动态响应特性越好.感温结点可近似看作球体,将球体体积公式和表面积公式分别带入时间常数定义式,得

由于密度ρ和比热容c均为常数,因此想要使时间常数减小,就要减小半径r,增大复合传热系数ht
在一定流速下,对流传热系数可近似用流体外掠圆球的经验公式计算
式中,λ,u,ν,a分别为流体的导热系数、速度、运动黏度、热扩散率;l为特征长度,此处为球体直径d;η∞为远处来流的动力黏度;ηw为球体表面流体的动力黏度.式(6)中只有特征长度和气流速度为变量,其他参数均为一定温度下的常数.由此可知,要得到理想的对流换热系数,主要考虑气流速度和感温结点尺寸.
由于被测气体的物性参数各有不同,对不同气体测温时,感温结点表面的等效辐射传热系数计算也不同.对于高温烟气对感温结点的辐射传热,等效辐射传热系数的经验公式[13]为

式中,σ0为玻尔兹曼常数,εf为烟气黑度,εtc为感温结点表面黑度,Tf为烟气的开氏温度,Ttc为感温结点的开氏温度.除了感温结点的表面黑度,其他参数均与热电偶本身无关,而表面黑度又很难被干预.用感温结点尺寸为μm级的热电偶测量高温烟气温度时,温度低于500K的烟气对感温结点的等效热辐射传热系数与其对流传热系数相差3个数量级;烟气温度高于500K时,仅相差两个数量级.因此,烟气辐射传热在温度较低时可忽略不计.
感温结点与周边固体壁面的辐射传热引起的相对误差δ可用下式计算[11]:

式中,C0为黑体辐射系数,tf为烟气的摄氏温度,Tw为流道内壁的开氏温度.由式(8)可知,对流传热系数hc与相对误差δ成反比.对于流速较大的气体,感温结点表面的对流传热系数较大,因此误差较小.
综上,测量高速气体瞬态温度变化,它的对流传热部分与流体速度及感温结点直径大小有关.速度越大、直径越小,则对流换热系数hc越大.对流传热也影响感温结点周边的壁面辐射带来的误差.对流传热系数越大,则相对误差越小.
2快速响应热电偶的制作
2.1热电偶丝材料选择
在制作热电偶的过程中,由于热电偶丝的直径非常小,难以观察和操作,制作本身有很大难度.为节省成本,采用便宜易得的
T型热电偶(铜-康铜热电偶).T型热电偶的使用温度为−200~300°C[14,15],满足一般流体测温要求;而且T型热电偶精度高、热电极均匀性好,在测温范围内灵敏度也比较高.市面上能够购买到的T型热电偶微细热电偶丝直径有30,40,50µm.
2.2热电偶感温结点焊接
热电偶感温结点半径越小,时间常数越小.感温结点由两种热电偶丝熔焊而成.焊接过程中需要注意对各种变量的控制,主要有焊接电压的大小、焊接的持续时间等.这些变量决定了焊接时电火花所产生的热量大小.发热量大,则熔融的偶丝长度较长,感温结点直径较大;反之则小.焊接时要根据经验调节这些变量大小,得到理想尺寸的感温结点.在焊接比较理想的情况下,感温结点半径一般为热电偶丝半径的2~3倍[16].
开始焊接之前,由于铜丝外层涂有绝缘漆,首先对焊接端进行脱漆处理.具体操作:用电烙铁头蘸上松香,高温使松香熔化.将漆包线接触松香,当达到一定温度时绝缘漆脱落.之后用棉签蘸少量酒精,擦去铜丝表面残渣.为了使热电偶的焊接结点足够小,两种热电偶丝的接触必须足够紧密.为此,先将处理过的铜丝与康铜丝铰接,拧成致密的麻花状,完成后用剪刀将端部裁剪整齐(铰接段越短越好),然后采用可控电容放电装置进行焊接[16].焊接时,将铰接后的端部轻触碳棒,产生电弧,将两种金属丝焊接在一起.焊接时接触碳棒不可太用力,否则焊接端容易在外力作用下拉开,导致焊接失败.整个焊接过程应一气呵成,切忌多次焊接,否则易使焊接后的结点变大且表面不光滑,易产生气孔和裂纹,且表面氧化现象严重,影响测量精度和准度.焊接完成之后,将焊接点置于数字显微放大镜下,通过计算机屏幕观察焊接点是否呈一个光滑的圆球状、尺寸是否较小、外形是否对称,以保证感温结点有足够快的响应速度和足够的拉伸强度.否则,剪掉之前打磨焊接过的部分,重复上述焊接过程.焊接成功后,在显微镜观察下,将焊接前铰接在一起的铰接段慢慢绕开,只留
下一个结点.这样热电偶只有唯一的感温结点,避免了两根偶丝因焊接点外其他地方接触而对测量结果造成影响.
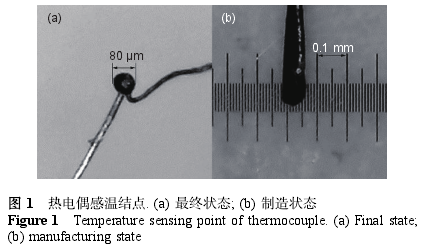
采用直径为30µm的铜丝和康铜丝.经过多次焊接,测得焊接结点(感温结点)均在100µm以内,重复性较好.图1为数字显微镜下的自制热电偶焊接结点(感温结点)放大图.图1(a)是热电偶最终状态时的照片,直径为80µm;图1(b)是热电偶焊接时的状态.
2.3热电偶的铠装结构设计
由上文分析可知,用热电偶进行气体测温时,气体流速越大,热电偶响应速度越快.在实际应用中,为了使热电偶能够满足实际工况要求,一般都需要对其进行铠装保护.而不太合理的铠装结构会对热电偶周围的流场产生较大影响,导致测温不正确.C5型号热电偶为例,为了保证热电偶感温结点的物理强度,防止感温结点因长时间受到摩擦、冲刷、撞击、腐蚀等而脱落或断裂,将热电偶丝铺设在特定材料(如陶瓷、刚玉)的基体上.这样的结构势必会对测点附近的流场产生很大影响,因此这种结构更加适合流体冲刷严重的场合.而在对普朗特数较小的气体测温时,气流流速较慢,就会产生较大的测量误差.所以,在进行结构设计时,必须考虑如何减小对原流场的影响.
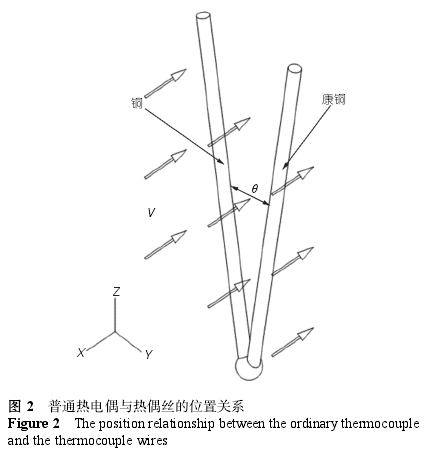
热电偶丝的存在也会对感温结点附近流体的状态产生影响.热电偶的时间常数有所差别.按照图2所示的热电偶感温结点与热电偶丝的空间位置,当流体速度方向与X方向一致时,所得时间常数最小;流体速度方向与Z轴方向一致时,时间常数最大.因此进行结构设计时,应尽量使流体方向与X方向一致,以获得最好的响应特性.但是热电偶丝太细,难以达到这个目的.因此考虑将热电偶丝的夹角增大,以减小热电偶丝的影响.
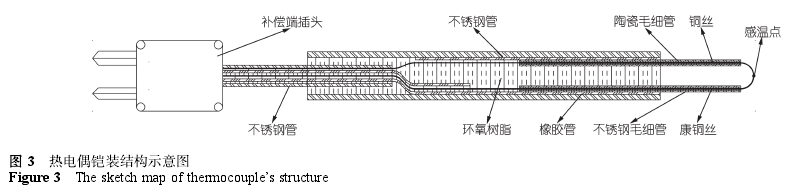
综合以上两点,设计了如图3所示的结构.两根热电偶丝分别从毛细管中穿出,毛细管提供支撑防护并避免相互接触短路,使感温结点(测点)远离铠装结构基体,减小基体对测点附近流场的影响.感温结点与流体直接接触;两根毛细管分别固定到不锈钢管内壁两侧,将两热电偶丝分隔开,使得两根热电偶丝之间夹角增大,从而减小热电偶丝对测点流体状态的影响.在实际测温时,流体流经圆柱状的毛细管时可能会产生振动,为了防止热电偶丝因毛细管振动而被拉断,热电偶丝不能被约束太紧.
2.4热电偶的铠装结构制作
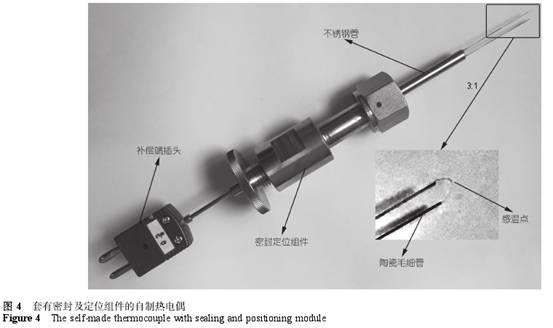
铠装结构如图3所示.具体制作过程:首先将焊接好的热电偶丝穿入陶瓷毛细管,陶瓷管能起到很好绝缘效果并提供支撑.在陶瓷管外再套一层直径为0.1mm的不锈钢毛细管,用来增加强度保护陶瓷管,防止陶瓷管被高速气流冲击而折断.将感温结点暴露于两陶瓷毛细管的中心位置.陶瓷管和不锈钢毛细管均穿入粗不锈钢管一定长度,在毛细管末端套上橡胶管,将热电偶丝与不锈钢管内壁隔离开来,保证热电偶丝与不锈钢管绝缘,避免热电偶丝与不锈钢管接触而引入干扰信号.为了保证密封性,不锈钢管内需要注入足够的环氧树脂,树脂密封层内不应有气孔、夹层.绝缘橡胶管割出若干小口,以便环氧树脂流入.注入环氧树脂后,将封装的热电偶传感器放入高温恒温室固化,温度设置为40~50°C.温度不宜太高,也不宜太低.若温度太高,环氧树脂内部会产生小气孔,影响密封性;温度太低,则流动性差,内部填充不均匀、不充分,且固化时间长.
图4为自制热电偶实物图,图中对可见部分做了标识.自制热电偶主要由3部分组成:铠装部分、密封及定位组件、补偿端插头.补偿端插头为公头,在实际应用时有母头与之配套,母头侧为热电偶冷端及补偿线.
3微细热电偶时间常数的标定
由于影响时间常数的因素非常多,且比较复杂,如感温结点与热电偶丝之间的热传导、感温结点与所处环境之间的热辐射和热对流,难以用理论计算的方法获得正确的数值解,因此实际应用中采用实验测定方法获得其时间常数.给热电偶测温点一个定量的温度阶跃,以热电偶温度阶跃的63.2%所对应时长(时间常数的定义)来表示热电偶的动态响应时间常数,用公式表示为
式中u0为热电偶初始电动势,ub为激光照射下感温结点温度与环境温度达到平衡时的电动势.得到u0和ub后即可得到ug,查找ug对应的时刻τg,减去温度阶跃的开始时刻τ0即可得时间常数τc.
对于毫秒级热电偶时间常数的测定,较为理想的温度阶跃是必需的.温度阶跃的上升时间要远小于热电偶的时间常数,这样才能使测量结果具有较高的正确性和可靠性.常用的实验方法主要有投入法[18]、热风洞法[19]、电加热法、激波管法[20~22]等.这几种方法各有优缺点,通过对比综合考虑,本文在对实验方法进行了改进完善,使用激光对热电偶进行加热,获得了较理想的正、负温度阶跃.实验系统如图5所示.
实验系统主要由控制开关、激光发射器、热电偶、补偿端、数据采集设备等部分组成.标定开始前,将整个标定系统置于恒温、气流稳定、无大型用电设备的室内(防止信号干扰).由手控开关发出信号,控制光耦隔离器的开关,光耦隔离器启动,触发晶体管导通,激光器开始工作.热电偶受到激光照射后温度迅速上升,示波器通道一采集热电偶产生的电信号.同时光耦隔离器的输出端并联一路到示波器的通道二,通道二中信号突变瞬间即为温度阶跃的开始时刻.光耦隔离器的触点开关响应时间为4.9µs,远远小于普通电子开关的动作时间,也小于热电偶的时间常数,对标定结果产生的影响可忽略不计.用光耦隔离器将手控开关信号与激光器电源信号隔离开来,采用无触点开关,避免手控开关的触点动作所需时间给标定结果带来干扰.
为了验证热电偶丝直径、焊接结点尺寸与时间常数之间的关系,用直径为30,40,50µm的热电偶丝分别焊接制成热电偶,并进行动态标定实验.
4标定结果分析
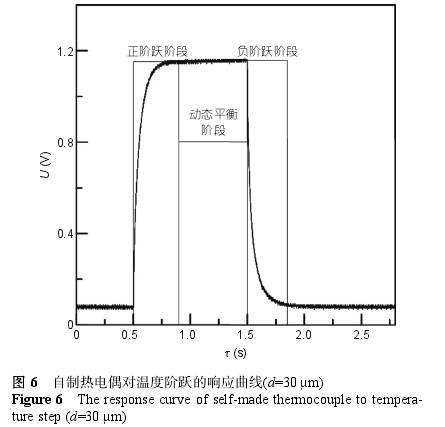
图6所示为直径30µm铜-康铜自制热电偶对温度阶跃的响应曲线图,横坐标为时间,纵坐标为热电偶的输出信号.可以看出,标定过程分为3个阶段:正阶跃阶段、动态平衡阶段、负阶跃阶段.从0.5s处开始为正阶跃阶段,激光开启,对热电偶感温结点进行加热,感温结点受到激光辐射传热;与此同时,感温结点还与周围环境存在热辐射和自然对流传热,但激光辐射能量远大于热电偶自身对外的散热,温度迅速上升.当τ≥5τc时为动态平衡阶段,激光热辐射能量等于自身散失的能量,感温结点温度达到动态平衡.可以看出,在动态平衡阶段,电动势仍存在小的波动情况,这是由外界环境变化引起的,如周围空气自然对流等的影响.激光关闭,进入负阶跃阶段,激光与感温结点间的辐射换热消失,热电偶通过与周围环境的热辐射及自然对流散热,温度迅速下降并最终与环境温度一致.
热电偶丝越细,时间常数越小,响应速度越快,但价格也越高,也为制作带来了更大的难度.为了节省成本,针对不同的实验要求,应选择适当时间常数的热电偶丝.本文对3种不同直径的热电偶丝所制作的热电偶进行动态标定,作为选择的依据.我们制作了多支不同直径的热电偶,并在尽量保证其他因素(如环境温度、激光器输出功率、环境气流等)不变的情况下对其进行了大量标定实验.在不同直径的热电偶中各挑选了一支热电偶,将其中一次的实验结果在图7中展示.图7(a)为热电偶对温度正阶跃响应曲线图.3支热电偶置于恒温环境中,按直径大小从小到大进行测试,因此初始温度基本一致.室温随着实验进行稍有上升,3支热电偶的初始温度分别为22.5,22.7,23.4°C.激光加热功率不变,但由于感温结点对焦情况不同,以及其物理性质的差异,导致达到动态平衡时的最终温度并不一致,略有差别,分别为309,355,334°C.温度阶跃幅值的不同会导致时间常数不同.温度阶跃幅值越大,则时间常数越大,但影响十分有限[17].实验中3支热电偶温度阶跃幅值差别不大,在实验中造成的影响可忽略不计.
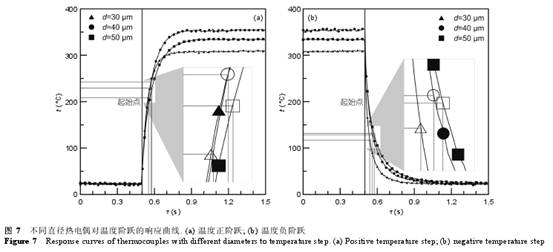
可以明显观察到,直径为30µm的热电偶最先达到0.632倍阶跃点,40µm热电偶次之,50µm热电偶最慢.计算得到3支热电偶的正阶跃时间常数分别为52.0,73.6,80.3ms,随热电偶丝直径增大而增大.图7(b)为热电偶对温度负阶跃响应曲线图.为了对比方便,将3支热电偶的初始时刻至于同一时刻.可明显观察到,3支热电偶的响应速度随热电偶丝直径增大而减小,30µm热电偶率先下降到0.368倍阶跃点.计算得到的时间常数分别为39.2,60.2,75.1ms,与正阶跃时间常数变化趋势一致.
图8为热电偶丝直径与时间常数的关系图.可以看出:(1)在相同条件下,随着热电偶丝直径增大,热电偶时间常数增大.其原因是热电偶丝越粗,在相同制作方法下的焊接结点越大,热容就越大.(2)对于同一支热电偶,正阶跃情况下的时间常数大于负阶跃情况下的时间常数.这是因为光沿直线传播,正阶跃时激光直射感温结点,感温结点只有正面部分受到激光辐射传热,背面不会受激光辐射而增加热量,反而会向外辐射而损失热量,导致整个表面辐射传热强度降低.而在负阶跃时,热电偶所有表面都参与到与环境之间的辐射以及自然对流传热中,因此散热更快.所以在负阶跃情况下标定得到的时间常数更接近真值,故以负阶跃时的时间常数作为此热电偶的时间常数.
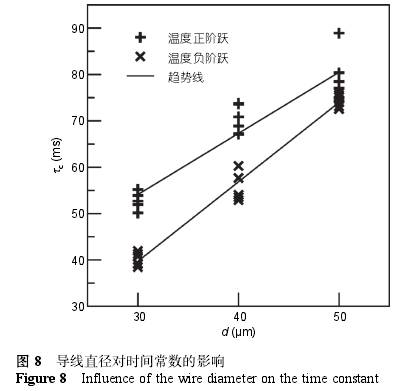
此外,从图8还可以看出,正负阶跃时间常数之间的差距随结点直径的增大而减小.出现这一现象的原因是,结点尺寸越大,热电偶丝直径也越大,热电偶丝的导热传热占比越大,因而热电偶的正负阶跃时间常数差减小.
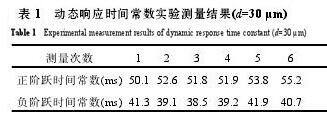
表1列出了自制30µm热电偶的6次标定结果.从结果看出,30µm热电偶在此实验条件下正阶跃时间常数为(52.6±2.6)ms,负阶跃时间常数为(40.1±1.8)ms.
5结论
以集中参数法为理论基础分析了快速响应热电偶得到理想时间常数的制作要点,制作了以30µm铜丝和康铜丝为原材料的快速响应热电偶,并改进实验系统对自制热电偶进行了动态标定,时间常数达到40ms左右.将直径30µm与直径40,50µm的自制热电偶进行了对比实验,测定了其各自时间常数并得出规律.使用具有一定强度和良好气密性的新型热电偶铠装结构,以自制微细热电偶为基础,制作了适用于容器中高速气流瞬态测温的热电偶.目前该传感器已投入科研项目的实际应用,具有较高的使用价值.

