热电偶温度变送器校验步骤
发布时间:2025-03-07
浏览次数:
热电偶温度变送器是将
热电偶与
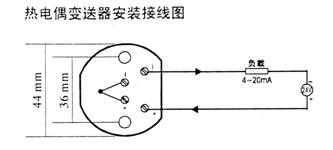
温度变送器模块单元以十分简捷的方式组合在一起,把-200~+1600℃范围内不同温度段的
热电偶测量的温度信号转换为二线制4~20mA DC的电流信号或者0~5V信号传输给显示仪、调节器、
记录仪、DCS或者直接进行RS485通讯等,实现对温度的测量和远传控制。一体化温度变送器根据用户要求有现场显示型和非现场显示型。
热电偶温度变送器校验步骤
1、检验时,在输放端接入电位差计,输出信号为电动势,在输出端接上24VDC稳压电源并串接上标准电流表。
2、调零:反接信号输入线,使电位差计输出校验现场室温对应电动势,调整电位器Z,使电流表读数为4mA。
3、调满:正接信号输入线,使电位差计输出满量程对应电动势,调整电位器S,使电流表读数为20mA。(该电动势为满度电动势减去室温对应电动势后的值)
例:在检验现场室温为7℃,输入信号为K,量程为0~1000℃的温度变送器标定,通过查表得知7℃对应电动势为0.277mV,1000℃对应电动势为41.269mV,反接后,电位差计输出0.277 mV,调整电位器Z,使电流表读数为4mA;正接线后电位差计输出读数为40.992 mV(41.269 mV-0.277 mV),调整电位器S,使电流表读数为20mA


 苏公网安备32083102000580
苏公网安备32083102000580