铂热敏电阻在液浮陀螺仪温控系统中应用
发布时间:2021-09-13
浏览次数:
摘要:建立了液浮陀螺仪温控模型,深人分析了其结构组成和工作原理。针对所建立的数学模型对各个结构参数进行了分析研究。对满足条件的热敏线圈和
铂热敏电阻的温控系统进行了实验验证,实验结果表明:改进后温控系统的静态性能和动态性能得到加强,控制精度较之前未受影响,铂热敏电阻器的使用未影响液浮陀螺仪的各项性能指标,为液浮陀螺仪选择更可靠的温控元件提供了有力的依据。
0引言
液浮陀螺仪的温控模型是整个液浮陀螺非常重要的组成部分。陀螺仪是决定惯性系统精度的核心部件,由于其对温度敏感度大,温度漂移成为其主要的误差源之一。温度变化对陀螺精度的影响主要反映在2个方面:一是陀螺器件材料性能本身对温度的敏感性;二是周围温度场对陀螺工作状态的影响2],因此,提高陀螺仪的温控精度和保证其长期可靠的稳定工作是--项非常重要的工作。国内外有关此方面的研究通常可归纳为以下三类解决方法[3]:
1) 通过合理设计改善陀螺结构,使陀螺器件的布局、零件的材料和结构形状满足对温度不敏感的要求;
2) 通过采用合适的温控装置或温度控制使陀螺工作在一个恒定的温度环境内;
3)通过热力学分析和试验研究的方法辨识出陀螺的静、动态温度模型,并依此进行温度误差补偿。本文通过理论分析和试验验证,对现有陀螺仪温控系统做研究和改进,大量数据表明:改进后的温控系统有更好的辨识精度和更.高的可靠性。
1液浮陀螺温控系统的组成和工作原理
液浮陀螺仪的温控系统包括测温电桥动态补偿环节和功率放大级。
1)测温电桥
内外测温铂金串联电阻Rr=Rc+Rf为交流电桥一臂,其余各臂由精密电阻R2,R3,Rw构成。Rw为工作温度设定可调电阻,可微调给定温度值。测温电阻随温度变化引起电桥不平衡电压△ug经放大后,其输出电压与工作温差呈比例。平衡电桥如图1。
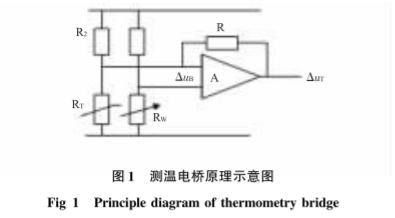
平衡电桥输出电压为
2)动态补偿环节
为改善浮液温控的动态特性,获得最快的加温时间和最小允许的超调,多采用微分、积分.比例校正环节K(s)。
3)功率放大级与加温
动态补偿电路输出,经功率放大转换为加热片的加温电流,使加热片的发热量为
2液浮陀螺仪热传导模型
浮液的温控精度和温度场的均匀性和热动态性能,主要取决于选择测温元件与加温元件的类型以及在陀螺上的布局和温控系统参数的选择。
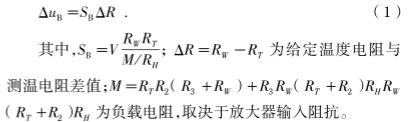
测温元件用电阻系数稳定的铂金丝,均匀分布绕在导热绝缘片上,并黏贴于陀螺壳体外壁上。另一铂金丝线圈置于浮液内直接敏感油温。加热元件采用高阻系数的镍铬片,将其加工成电热丝片.片的两面贴以耐温绝缘传热的聚乙烯薄膜,用其硫化硅橡胶固化。加热片卷贴于测温片的外面,加热丝厚度与宽度取决于加热功率的大小,加热丝的疏密取决于温度场的分布。加热片的外面有保温盒磁屏蔽的铍莫合金外罩。
为分析浮液温度场,首先应建立陀螺热传导模型。设陀螺电机传导到陀螺浮液的热量为Qmf,Qh.k为自然对流到平台帽罩的热量;加热片发热量为Qh,经壳体传人浮液热量为Qu,传到陀螺安装界面的热量为Qhp,经屏蔽單由空气介质对流出去。陀螺热的传导除与传导路径的热阻和热容量有关外,还与作为温控系统干扰源的环境温度的变化有关。浮液的热传导如图2所示。
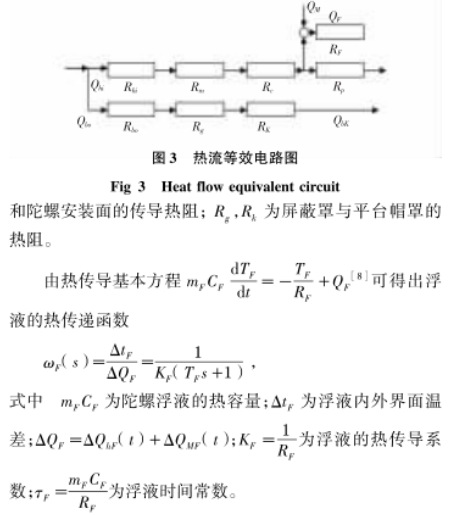
根据具体结构尺寸和材料计算出各节点间的热阻系数,考虑浮液较大的热容惯性,作出热流图的等效电路图如图3所示。
图3中,Rhi,Rho为加热片内、外绝缘导热层的热阻;R.为测温片热阻;Re为陀螺壳体热阻;Rf,Rp为浮液对流热阻
3温控系统数学模型
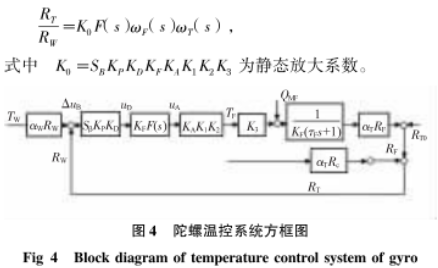
根据上述式(1).式(2).式(3)可以做出陀螺温控系统的方块图“如图4所示。
系统的开环传递函数如”下
S
B为电桥测温灵敏度;Kp,KD,KF,F(s),KA为前放、解调、动态补偿、电流放大级的传递系数;K1,K2,K3为加热片、浮液外壁与内璧的热导系数;aw,ar为Tw,Rr,的电阻温度系数;Tw,Tf为要求的工作温度与实际的控制温度。
假定不用校正网络,令F(s)=1,当采用热敏电阻器串联测温时,Rr=Rf+Rc,并联热路的传递函数为

这相当于增加微分比例环节,改善了系统动态特性,这是因为外测温丝比内测温丝超前敏感温度的变化,选择为某一最佳值中,使动态性能较好10]。根据温控特性要求,即可选择系统的静态参数和动态参数。
4实验验证
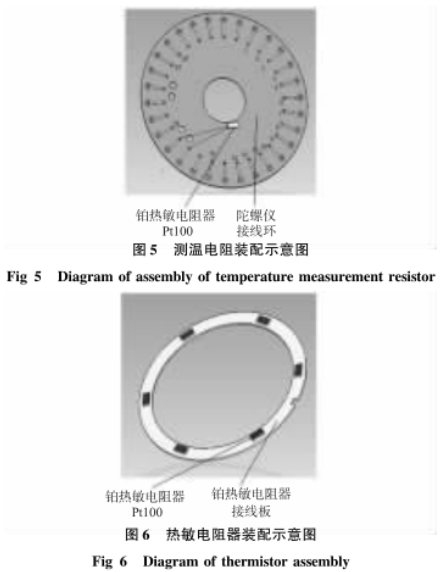
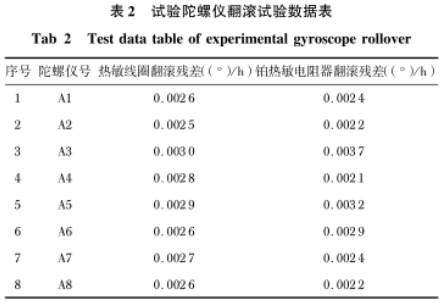
实验主要对比现在天津航海研究所正在用的线绕热敏元件和铂热敏电阻器的各项参数。根据上述对温控系统的分析和长期试验积累选择了合适的n值,试验所采取的温控方式为:保留原测温线圈,并在陀螺仪接线环背面接测温电阻器P100作为新的测温电阻器;保留原热敏线圈,并在专门制作的接线片上串联相应数量的热敏电阻器P100,示意图如图5、图6。
在原热敏线圈和铂热敏电阻器二种工作方式下,分别采集测温线圈和测温电阻器的阻值,对比两种工作方式下的温控精度测漂精度和翻滚残差,对比在两种热敏元件的工作方式下对陀螺仪的各种静态动态性能的影响。
4.1温控精度测试试验
按照测试方案,分别对8只试验陀螺仪两种温控状态进行了8h的静态温控精度测试。采集8h测试数据,重复7次试验,计算每次测试数据的标准方差,陀螺--次启动连续测试的标准偏差σ,并用σ作为陀螺温控精度的测试结果

从表1可以看出:作为温控元件的热敏电阻器和热敏线圈具有相当的温控精度。经计算,将热敏线圈作为温控元件的平均温控精度为0.0098℃,将热敏电阻器作为温控元件的平均温控精度为0.0096℃。
4.2翻滚试验
将试验陀螺仪按照正常测试程序进行平行极轴12点翻滚,翻滚的初始位置是:自转轴SA指西,输人轴IA指南。转台以每30°的增量进行断续翻滚,并记录每一-位置相应的反馈电流I,,采样平均时间为1min。这样,翻滚一周共有12个数据,用富氏分析法对所得数据进行处理。

同时采集测温线圈和测温电阻器阻值,将翻滚过程中所采集数据的标准方差作为温度稳定性的标准,同时记录翻滚残差,翻滚7次,把每组标准方差值,翻滚残差录人试验数据表格。翻滚数据结果统计如表2。
以上数据表明:在铂热敏电阻器和热敏线圈两种不同.元件的温控状态下,翻滚试验具有相当的翻滚残差。
4.3时间稳定性测试
表3是实验陀螺仪分别采用热敏线圈和铂热敏电阻器进行测试的陀螺仪时间稳定性。
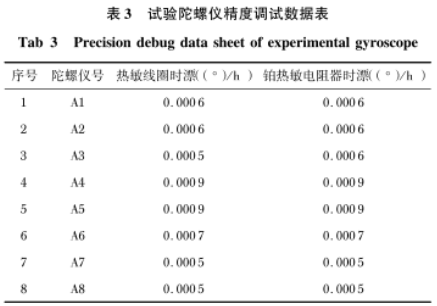
从以上试验数据可以看出:采用铂热敏电阻器后,陀螺仪的时漂小于0.001°/h,没有对其精度产生影响。
5结论
本文通过对液浮陀螺仪温控系统的分析研究,得出了系统对热敏元件的基本要求,鉴于长期使用的线绕元件可靠性较差的问题,本文对满足温控系统条件的热敏线圈和铂热敏电阻器进行了一系列对比试验,试验结果表明:在保证系统温控精度的前提下,铂热敏电阻器替代线绕热敏元件具有一定的可行性,为液浮陀螺仪选择合适的温控元件提供了相应的依据。

